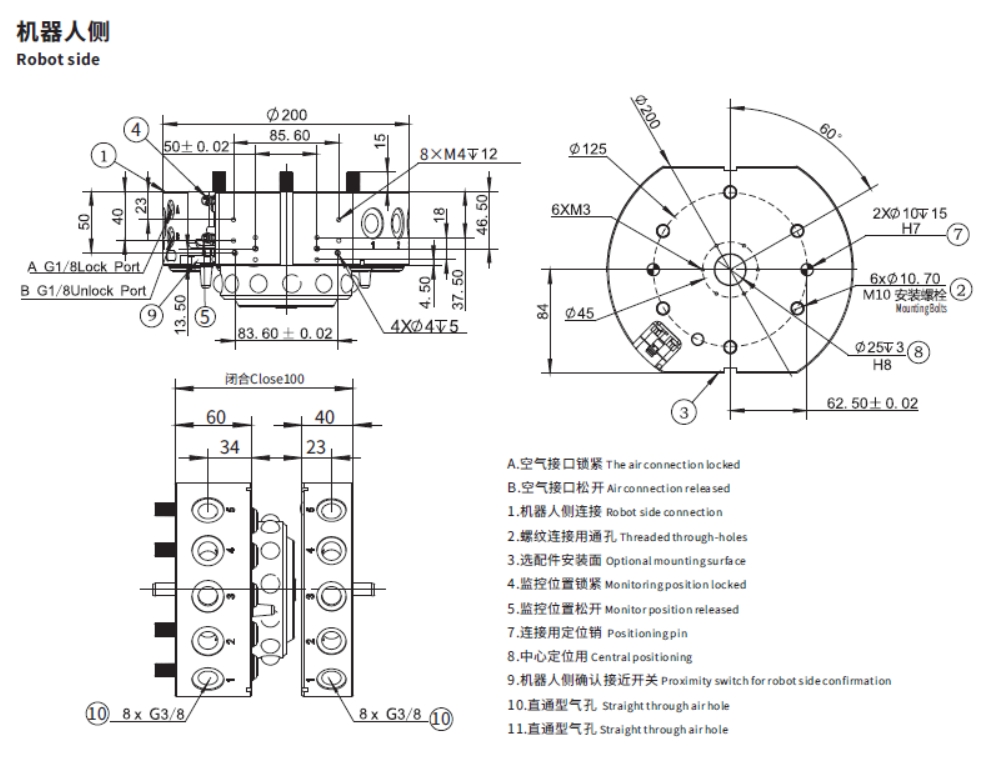
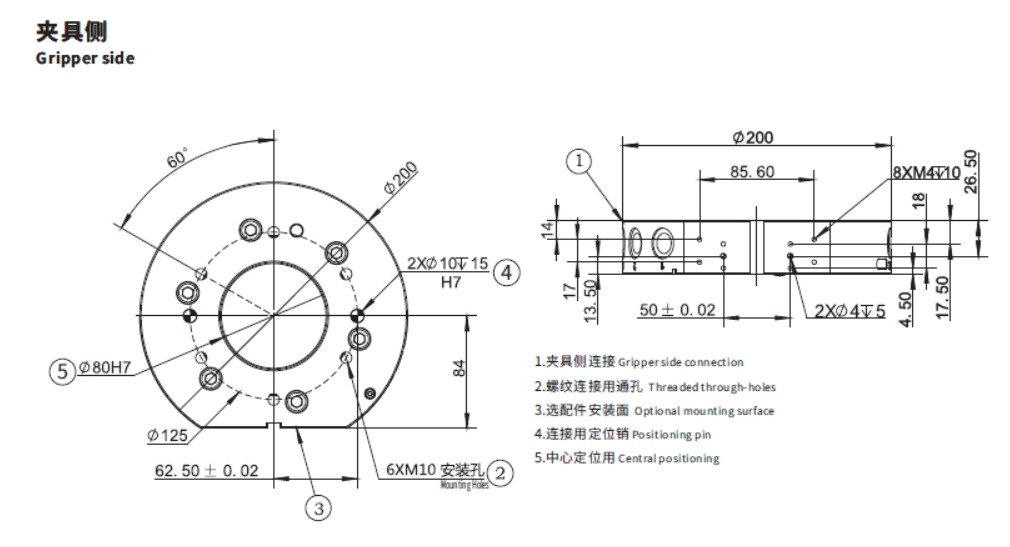
ZÎREYA GUHERÎNERÊN LEZGÎN – QCA-200-D1 Amûrek Guherîner a Lezgîn li Dawîya Robotekê


Kategoriya Sereke
Guherkera Amûrên Robotî / Guherkera Amûrên Dawîya Mil (EOAT) / Sîstema Guhertina Bilez / Guherkera Amûrên Otomatîk / Navrûya Amûrên Robotîkî / Aliyê Robotî / Aliyê Girêker / Nermbûna Amûran / Berdana Bilez / Guherkera Amûrên Pneumatîk / Guherkera Amûrên Elektrîkî / Guherkera Amûrên Hîdrolîk / Guherkera Amûrên Rastîn / Mekanîzmaya Kilîta Ewlehiyê / Bandorkera Dawî / Otomasyon / Karîgeriya Guhertina Amûran / Guhertina Amûran / Otomasyona Pîşesaziyê / Amûrên Dawîya Milê Robotîkî / Sêwirana Modular
Bikaranînî
Amûrên Dawî yên Çekan (EOAT) bi berfirehî di pîşesaziyên wekî çêkirina otomobîlan, elektronîka 3C, lojîstîk, qalibkirina derzîkirinê, pakkirina xwarin û dermanan, û hilberandina metalan de tê bikar anîn. Fonksiyonên wê yên sereke hilgirtina perçeyên kar, qeyandin, rijandin, vekolîn û guhertina bilez a amûran in. EOAT bi girîngî karîgeriya hilberînê, nermbûn û kalîteya hilberê zêde dike, û ew dike beşek girîng a otomasyona pîşesaziya nûjen.
Taybetî
Rastbûna bilind
Aliyê girtina pistonê ya verastkirina rola bicihkirinê dilîze, ku rastbûna bicihkirina dubarekirî ya bilind peyda dike. Yek milyon ceribandinên çerxerê nîşan didin ku rastbûna rastîn ji nirxa pêşniyarkirî pir zêdetir e.
Hêza bilind
Pîstona kilîtkirinê ya bi qûtra silindirê mezin xwedî hêzek kilîtkirinê ya bihêz e, cîhaza robota SCIC a dawiya bilez xwedî şiyana dij-torkê ya bihêz e. Dema kilîtkirinê, ji ber tevgera bilez lerzînek çênabe, bi vî rengî ji têkçûna kilîtkirinê dûr dikeve û rastbûna pozîsyona dubarekirî misoger dike.
Performansa bilind
Mekanîzmaya kilîtkirinê bi sêwirana rûyê pir-konîk, pêkhateyên mohrkirinê yên temendirêj û proba têkiliya elastîk a bi kalîte bilind têne bikar anîn da ku têkiliya nêzîk a modula sînyalê misoger bikin.



Parametreya Taybetmendiyê
| Rêzeya Guherkera Bilez | ||||
| Cins | Barkêşiya herî zêde | Rêya gazê | Hêza Qefilandinê @80Psi (5.5Bar) | Giraniya berhemê |
| QCA-05 | 5 kg | 6-M5 | 620N | 0.4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0.3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0.3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1.0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1.4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1.7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1.9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5.2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3.7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6.2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9.0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9.0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9.4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23.4 kg |

Aliyê robotê

Aliyê girtingehê
Modula Pêkanîn
Cureyê Modulê
| Navê Berhemê | Cins | PN | Voltaja Xebatê | Herika Xebatê | Girêdan | Girêdana PN |
| Modula sînyala aliyê robotê | QCSM-15R2 | 7.Y00468 | 24V | 2.5A | D-Sub15R2-1000① | 1.Y10080 |
| Modulê sînyala aliyê girtinê | QCSM-15G2 | 7.Y00469 | 24V | 2.5A | D-Sub15G2-1000① | 1.Y10081 |
| Modula sînyala aliyê robotê | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S② | 1.Y10710 |
| Modulê sînyala aliyê girtinê | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P② | 1.Y10711 |
| Modula sînyala aliyê robotê | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Modula sînyala aliyê robotê | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Modula sînyala aliyê robotê | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Modula sînyala aliyê robotê | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Modulê sînyala aliyê girtinê | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Modulê sînyala aliyê girtinê | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Modula sînyala aliyê robotê | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Modula sînyala aliyê robotê | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Modulê sînyala aliyê girtinê | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Modulê sînyala aliyê girtinê | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Modulê sînyala aliyê girtinê | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Modulê sînyala aliyê girtinê | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Modula sînyala aliyê robotê | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Modula sînyala aliyê robotê | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Modulê sînyala aliyê girtinê | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Modulê sînyala aliyê girtinê | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
① Dirêjahiya kabloyê 1 metre ye ② Tenê girêdan, bê têl
Modula Dirêjkirina Pneumatîk
| Navê Berhemê | Cins | PN | Riya Gazê | Kunê bi têl |
| Modula Dirêjkirina Pneumatîk a Aliyê Robotê | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Modula Dirêjkirina Pneumatîk a Aliyê Girperê | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Modula Dirêjkirina Pneumatîk a Aliyê Robotê | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Modula Dirêjkirina Pneumatîk a Aliyê Girperê | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Modula Dirêjkirina Pneumatîk a Aliyê Robotê | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Modula Dirêjkirina Pneumatîk a Aliyê Girperê | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Modula Dirêjkirina Pneumatîk a Aliyê Robotê | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Modula Dirêjkirina Pneumatîk a Aliyê Girperê | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Modula Dirêjkirina Pneumatîk a xwe-îlankirî ya aliyê robotê | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Modula Dirêjkirina Pneumatîk a xwe-îlankirî ya aliyê girtinê | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Modula Dirêjkirina Pneumatîk a Aliyê Robotê | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Modula Dirêjkirina Pneumatîk a Aliyê Girperê | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Cureyê Modula Frekansa Bilind
| Navê Berhemê | Cins | PN | Voltaja Xebatê | Herika Xebatê |
| Modula Sînyala Aliyê Robotê | QCHFM-E14-C1R | 7.Y02003 | 1.4KV | 5A |
| Modula Sînyala Aliyê Girperê | QCHFM-E14-C1G | 7.Y02004 | 1.4KV | 5A |
Modula Sînyalê (navrûya kabloya torê)
| Navê Berhemê | Cins | PN |
| Modula sînyala aliyê robotê | QCSM-RJ45-06R | 7.Y02007 |
| Modulê sînyala aliyê girtinê | QCSM-RJ45-06G | 7.Y02008 |
Modula Hêza Servo
| Navê Berhemê | Cins | PN |
| Modula hêza servo ya aliyê robotê | QCSM-08R1 | 7.Y02080 |
| Modula hêza servo ya aliyê gripperê | QCSM-08G1 | 7.Y02081 |
Modula Sînyala Servo
| Navê Berhemê | Cins | PN |
| Modulê sînyala servo ya aliyê robotê | QCSM-12R | 7.Y02082 |
| Modulê sînyala servo ya aliyê gripperê | QCSM-12G | 7.Y02083 |
Modula Hewayê ya Şileya Xwe-Morkirinê
| Navê Berhemê | Cins | PN |
| Modula sînyala aliyê robotê | QCWM-02R | 7.Y02049 |
| Modulê sînyala aliyê girtinê | QCWM-02G | 7.Y02050 |
Karsaziya me


Kategoriyên berheman
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

ZÎNGEHA GUHERÎNERÊN LEZGÎN – QCA-S100 Cûzek Lezgîn...
-

ZÎNGEHA GUHERÎNERÊN LEZGÎN – QCA-25 Guhertinek Lezgîn...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER AG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...