Milê Robotê Hevkar ê Azadiya 6-Axis a Agv ya Jîr ji bo Paletkirinê


Milê Robotê Hevkar ê Azadiya 6-Axis a Agv ya Jîr ji bo Paletkirinê
Kategoriya Sereke
AGV AMR / hilgirtina bi jack AGV AMR / Wesayîta rêberkirî ya otomatîkî ya AGV / Robota mobîl a xweser a AMR / Otomobîla AGV AMR ji bo hilgirtina materyalên pîşesaziyê / Robota AGV ya hilberînerê Çînî / depoya AMR / AMR hilgirtina bi jack AMR navîgasyona lazer a SLAM / Robota mobîl a AGV AMR / Navîgasyona lazer a şasî ya AGV AMR / robota lojîstîkî ya jîr
Bikaranînî

Şasîya Bêmirov a Rêzeya AMB AMB (Auto Mobîl Base) ji bo wesayîta xweser a agv, şasiyeke gerdûnî ye ku ji bo wesayîtên xweser ên rêberkirî yên agv hatiye çêkirin, hin taybetmendiyan peyda dike wekî sererastkirina nexşeyê û navîgasyona herêmîkirinê. Ev şasîya bêmirov ji bo erebeya agv navgînên berfireh ên wekî I/O û CAN peyda dike da ku modulên jorîn ên cûrbecûr bi nermalava xerîdar a bihêz û pergalên şandinê re bi hev re saz bike da ku alîkariya bikarhêneran bike ku çêkirin û sepandina wesayîtên xweser ên agv bi lez temam bikin. Li jorê şasîya bêmirov a rêzeya AMB ji bo wesayîtên xweser ên rêberkirî yên agv çar kunên sazkirinê hene, ku piştgirîya berfirehkirina keyfî bi jacking, teker, manipulator, kişandina veşartî, pêşandanê, û hwd. dike da ku gelek serîlêdanên yek şasî bi dest bixe. AMB bi hev re bi SEER Enterprise Enterprise Enhanced Digitalization dikare şandin û bicihkirina yekgirtî ya bi sedan hilberên AMB di heman demê de pêk bîne, ku asta jîr a lojîstîk û veguhastina navxweyî di kargehê de pir baştir dike.
Taybetî
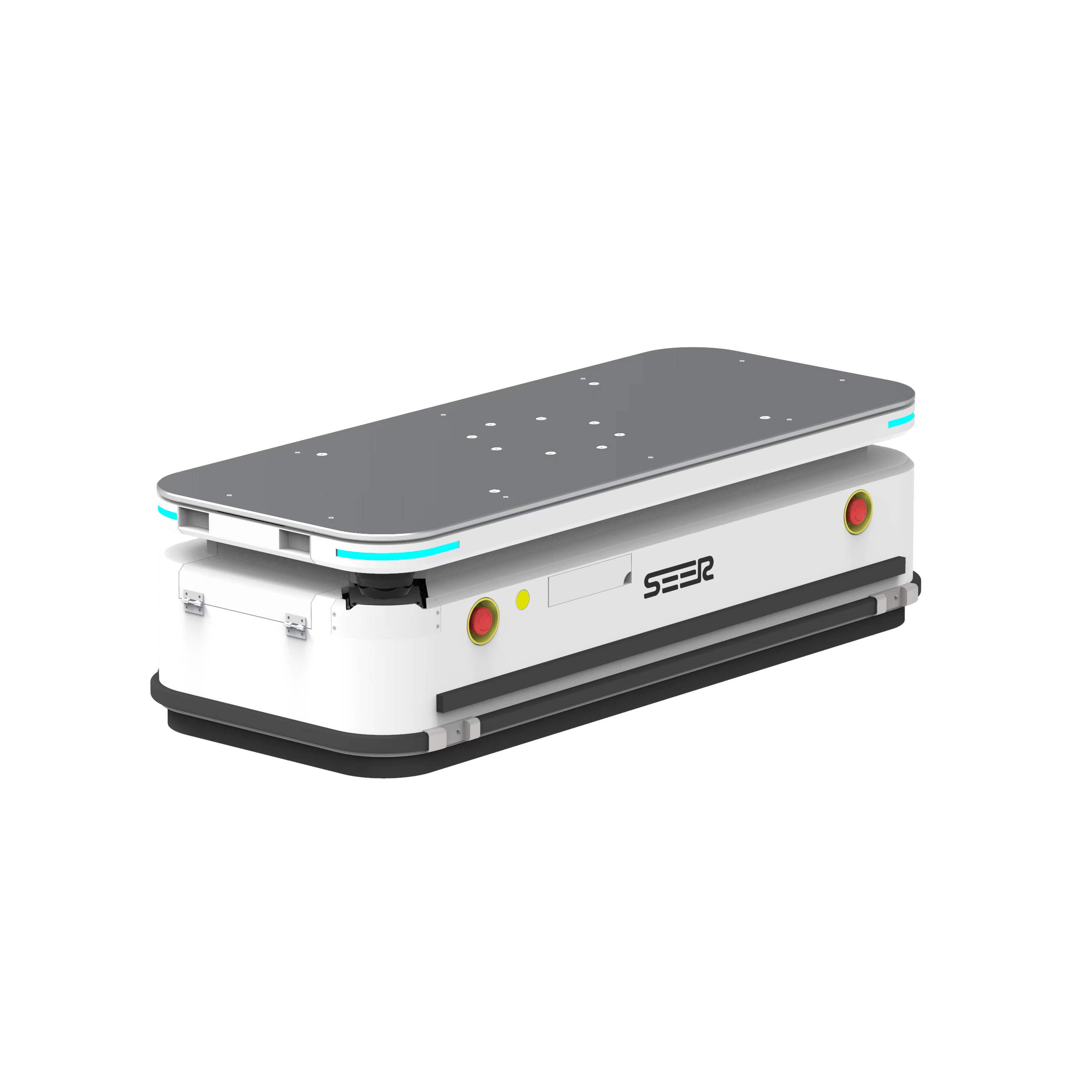
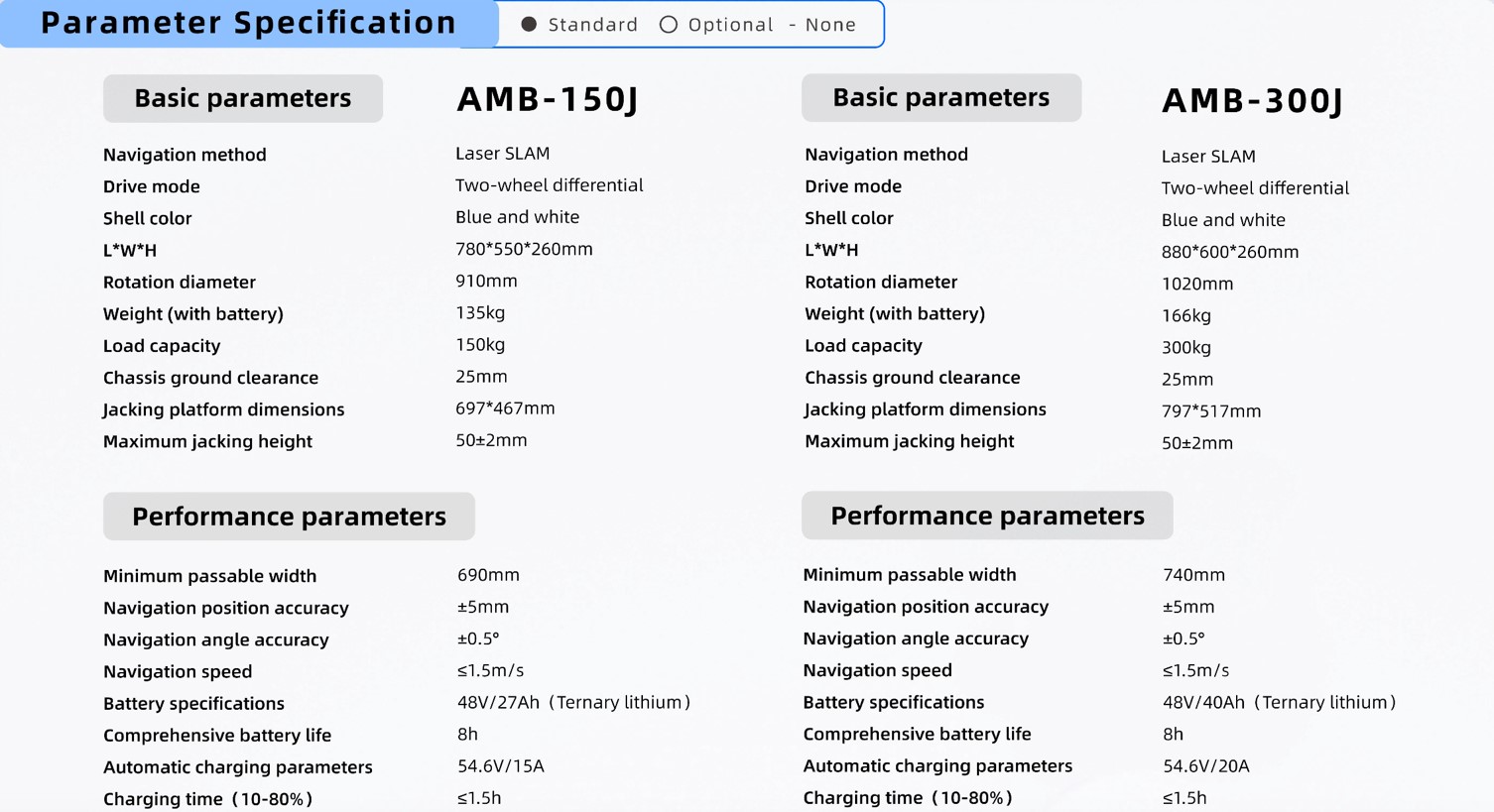
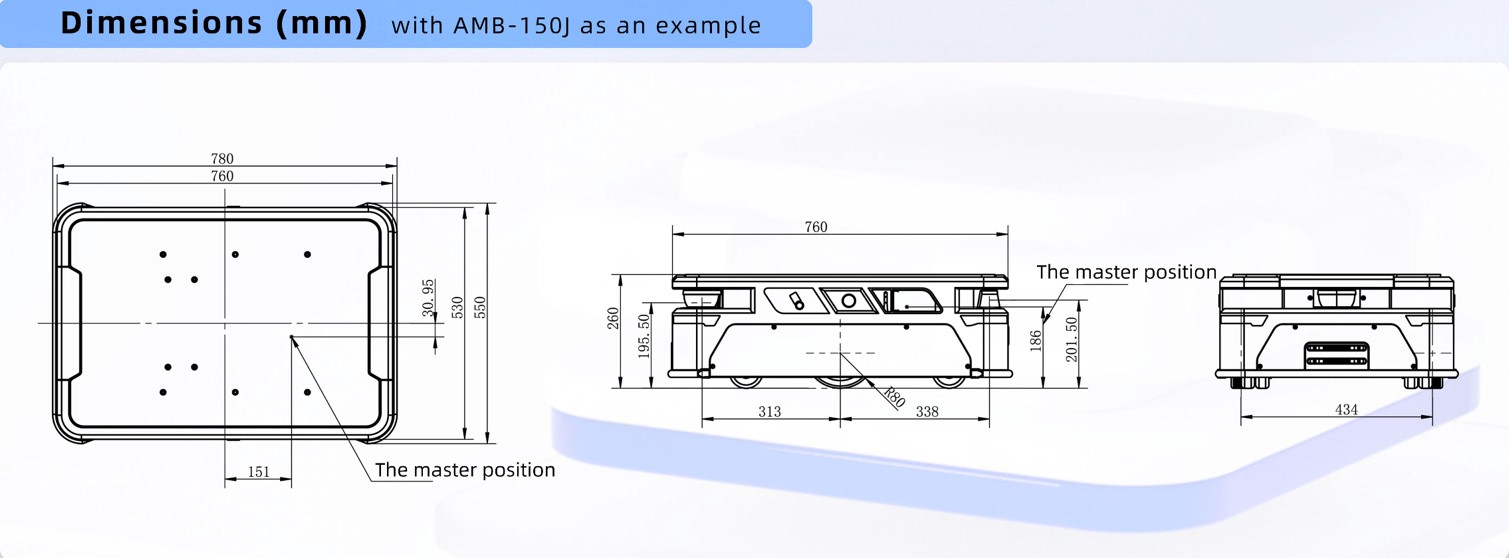
· Kapasîteya barkirinê: 150kg û 300kg
· bilindahiya herî zêde ya hildanê: 50 mm
· Rastbûna pozîsyona navîgasyonê: ± 5 mm
· rastbûna goşeya navîgasyonê: ± 0.5°
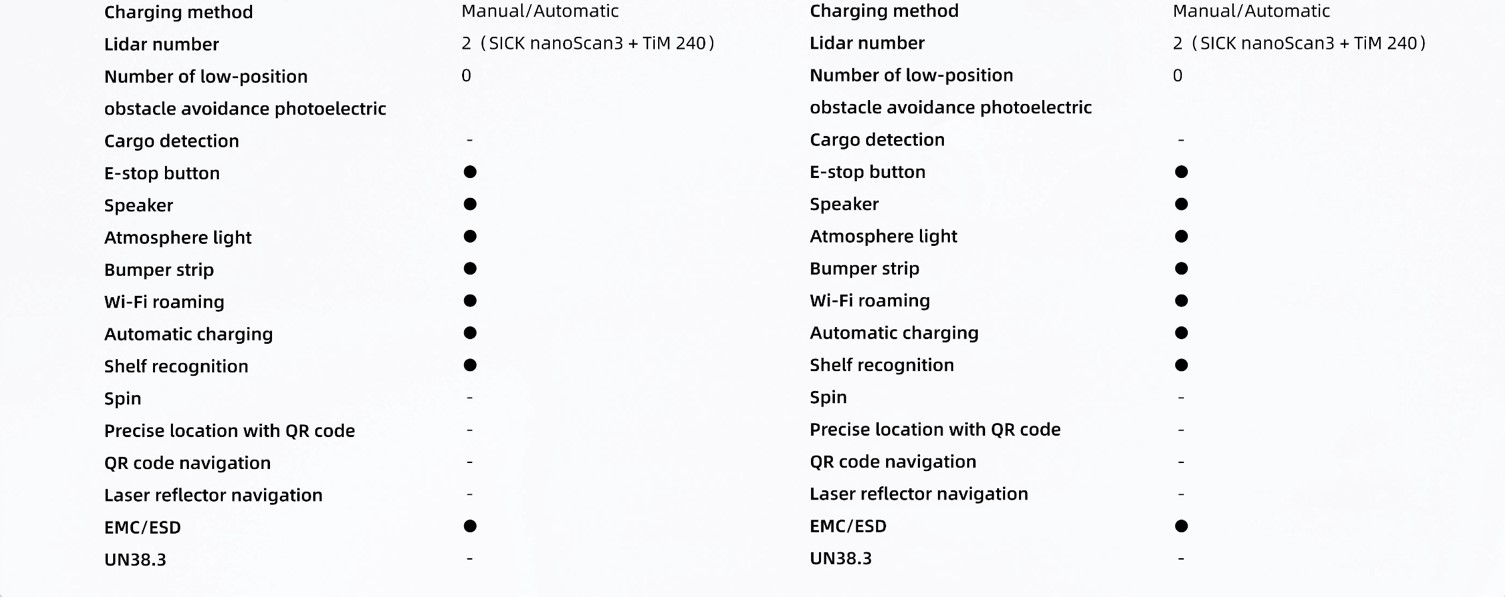
● Taybetmendiyên dewlemend di her demê de hene
Taybetmendiyên standard ên berfireh û hêja û taybetmendiyên pêşkeftî yên dewlemend û pratîkî alîkariya xerîdaran dikin ku bi hêsanî lojîstîkên aqilmend bi dest bixin.
● Platformên pir-taybetmendî ji bo berfirehkirinê hene
Platformên 150kg û 300kg peyda bikin da ku hewcedariyên bar û cihê bûyerê yên pîşesaziyên cûda bicîh bînin. Ew dikare bi manipulatoran, tekeran, jacking, kişandina latent, pan/tilt, ekrana nîşandanê, û hwd. re jî were bikar anîn da ku bi yek şasî gelek serlêdanan pêk bîne.
● ±5 mm, bikêrhatî û rast
Algorîtmaya Laser SLAM ji bo bidestxistina cihgirkirina rastbûna bilind tê bikar anîn, bi rastbûna cihgirkirina dubarekirî ya ne-refleks a lazerê di nav ±5 mm de, ku girêdana bênavber di navbera robotên mobîl û mirovan de, û herikîna barhilgir a bi bandor di navbera xalên cûda de gengaz dike. Nîşe: Nirxên rastîn bi şert û mercên jîngehê ve girêdayî ne.
● Navîgasyoneke stabîl ji bo ewlehî û pêbaweriyê
Navîgasyona lazer SLAM, navîgasyona reflektora lazer, navîgasyona koda QR û rêbazên din ên navîgasyonê bi rengek bêkêmasî têne yek kirin û bi rengek bêkêmasî têne guheztin da ku xebata domdar a robota mobîl misoger bikin.
● Belavkirina hêsan û rêveberiya xuya
Gelek nermalava piştgirî û pergalên dîjîtal dikarin bi hêsanî xebitandin, bernamekirin û rêveberiya agahdariyê ya robotên mobîl pêk bînin, û bi rengek bêkêmasî bi pergala MES a kargehê ve girêbidin da ku bi rastî lojîstîka jîr pêk bînin.
Berhemên Têkildar



Parametreya Taybetmendiyê
Karsaziya me


Kategoriyên berheman
-

Girêka Robotîk a Elektrîkî ya 2 Tilî Paralel bi ...
-

Hitbot Zarm 2140c Robot Industrial 4 Axis Scara...
-

Çîn Çêkirina Kalîteya 6 Axis Industrial Rob ...
-

303ED Hilbijartina Bihayê Herî Baş û Pîşesaziya Destan a Robotê ya Cihê ...
-

Robotê Pîşesaziyê yê 5kg Payload Cobot Firotina Germ ...
-
2021 Robota Hevkar a 6-Axis 3kg Ai ya Firotana Germ a 2021 ...