Jeneratora Valahî ya Girêdana Nerm a Du Tilî ya Pneumatîk a Hevkar ji bo Otomasyona Robotan



Jeneratora Valahî ya Girêdana Nerm a Du Tilî ya Pneumatîk a Hevkar ji bo Otomasyona Robotan
Kategoriya Sereke
Milê robotê pîşesaziyê / Milê robotê yê hevkar / Girêka elektrîkê / Aktîvatorê aqilmend / Çareseriyên otomasyonê
Bikaranînî

Girpên robot ên rêzeya SCIC Z-EFG bi mezinahiya piçûk in û xwedî pergala servo ya çêkirî ne, ku dihêle hûn kontrola rast a leza, pozîsyon û hêza girtinê bi dest bixin. Pergala girtina pêşkeftî ya SCIC ji bo çareseriyên otomasyonê dê bihêle ku hûn ji bo otomasyona karên ku we qet nefikirîbûn derfetên nû vekin.
Taybetî
· Lêdana mezin
· Hêza girtinê ya verastkirî û lêdaneke verastkirî
· Jiyana dirêj: bi deh mîlyonan çerx, ji pençeyên hewayê derbas dibe
· Kontrolkera çêkirî: mezinahiya piçûk, entegrasyona hêsan
· Kontrola otobusê ya EIA485, I/O
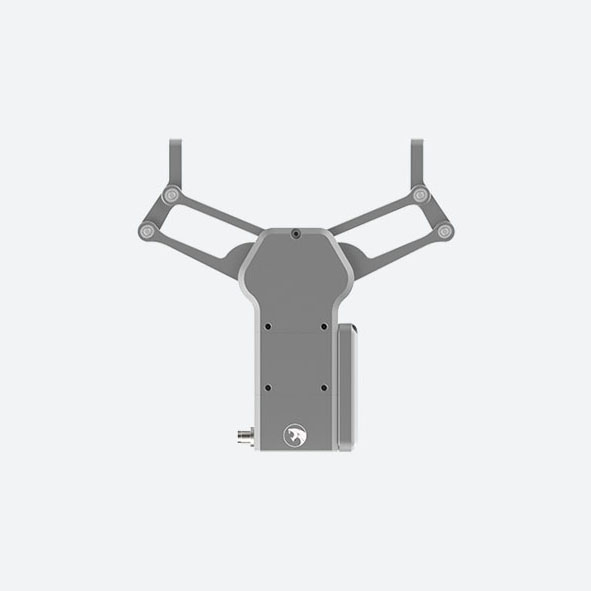
Hêza Girtinê: 40-130N, Şeklê Y-yê ya Girêka Elektrîkî bi lêdana 120 mm
Lêdana Dirêj
Tevahiya lêdanê: 120mm
Moda Kontrolê
485 Modbus, EIA485, Kontrola Otobusê
Hêza Girtinê
Hêza Girtinê 40-130N Verastbar
Kontrolkera Hundir
Veguhestina deverek piçûk, entegrekirina hêsan
Kontrola Rastbûnê
Dubarekirin: ±0.02mm
Girtineke Nerm
Ew dikare tiştên nazik û deformasyonê bigire

● Pêşvebirina şoreşekê di guhertina girgirên pneumatîk bi girgirên elektrîkî de, yekem girgira elektrîkî bi pergala servo ya yekbûyî li Çînê.
● Şûna bêkêmahî ji bo kompresora hewayê + fîlter + valva solenoid + valva gazê + girtina pneumatîk
● Jiyana xizmetê ya pir-çerxî, li gorî silindirê kevneşopî yê Japonî



Parametreya Taybetmendiyê
| Hejmara Modelê Z-EFG-130 | Parametre |
| Hemî felc | 120mm |
| Hêza girtinê | 40-130N |
| Dubarekirin | ±0.02mm |
| Giraniya girtinê ya pêşniyarkirî | Herî zêde 1 kg |
| Dezgeh awa | Gûzê pêçayî + girêdan |
| Dagirtina rûnê pêkhateyên tevgerbar | Her şeş meh an jî 1 milyon tevger / car |
| Dema tevgera lêdana yekalî | 0.9 çirke |
| Rêzeya germahiya xebitandinê | 5-55℃ |
| Rêzeya şilbûna xebitandinê | RH35-80(Qeşa tune) |
| Moda tevgerê | Girêdan |
| Kontrolkirina lêdanê | Lêtê |
| Rêkxistina hêza girtinê | Lêtê |
| Pîvan | 0.8 kg |
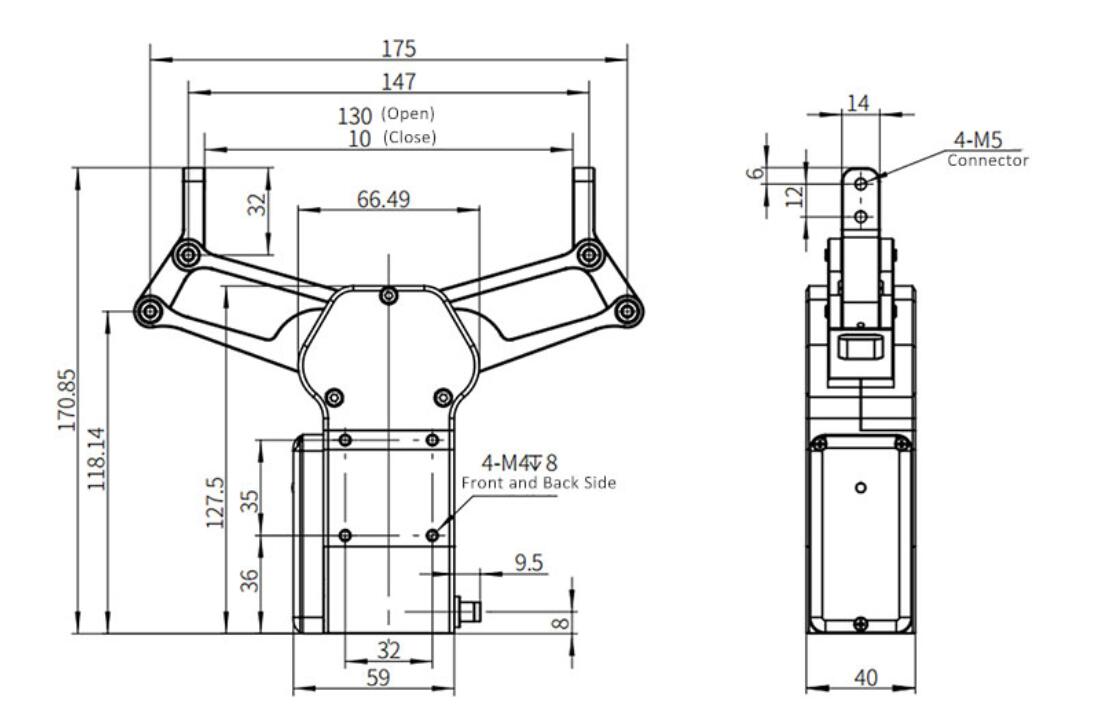
| Pîvan(L*W*H) | 171*187*40mm (vekirî) 218*66.5*40m (girtî) |
| Cihê kontrolkerê | Çêkirî |
| Erk | 10W |
| Cureyê motorê | DC bê firçe |
| Herikîna Bilind | 2A |
| Voltaja nirxandî | 24V |
| Herika amadebûnê | 0.4A |
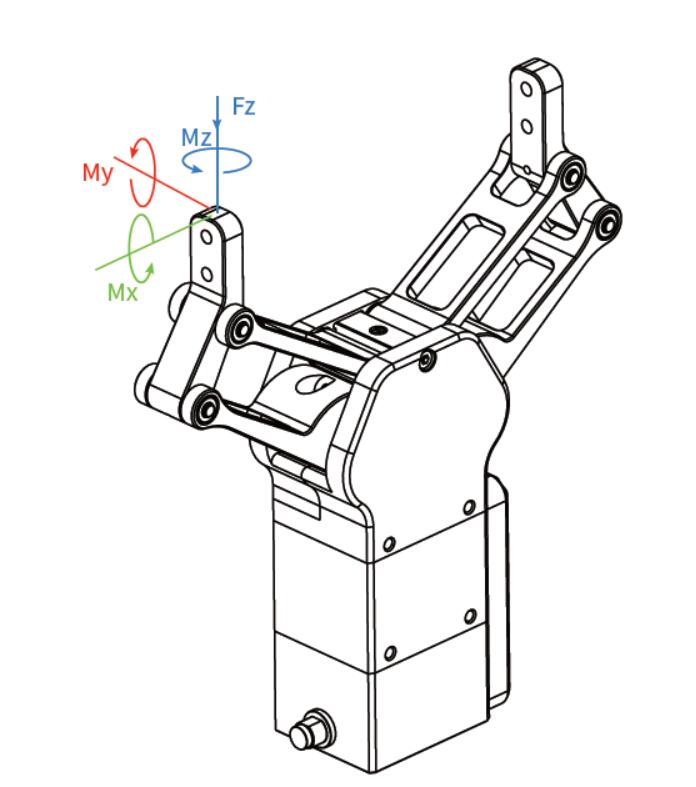
| Barkirina statîk a destûr di rêça vertîkal de | |
| Fz: | 200N |
| Torka destûrdayî | |
| Mx: | 2 Nm |
| Ya min: | 2 Nm |
| Mz: | 2 Nm |
Plug and Play, Entegrasyonê rehet
Girêka elektrîkî ya Z-EFG-130 dikare bi baskê robotê hevkar re hevaheng be, û di hundurê wê de pergala servo ya entegre heye, tenê yek girek dikare bi kompresor + fîlter + Valva solenoid + Valva Gazê + girêka hewayê re wekhev be.


Lêdana Dirêj, Lihevhatina Mezin
Lêdana bi bandor a grippera elektrîkê dikare heya 120 mm be, mezinahiya girtina wê 10 mm ye, grippera elektrîkê dikare ji bo çîpa nîvconductor, elektronîkî 3C û pîşesaziyên din ên rastîn, hwd. were bikar anîn.
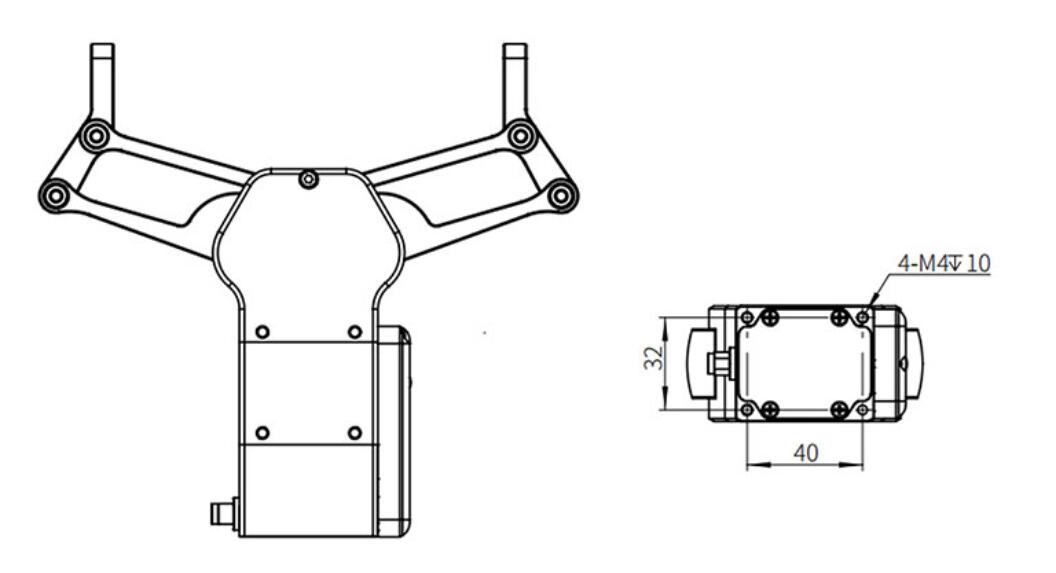
Mezinahiya Biçûk, Entegrasyonê Rehet e

Mezinahiya vekirina Z-EFG-130 171*187*40mm ye, mezinahiya girtinê 218*66.5*40mm ye, avahiyek kompakt e, celebên sazkirinê yên pirjimar piştgirî dike, kontrolker di hundir de ye, qada piçûk tê nixumandin.

Kontrola Hêza Rastbûnê
Girêkera elektrîkê ji bo karanîna sêwirana veguheztina taybetî û tezmînata algorîtmaya ajotinê ye, hêza girtinê 40-130N verastkirî ye, giraniya girtinê ya pêşniyarkirî ≤1kg e, û ew dikare dubarekirina ± 0.02 mm pêk bîne.
Grab Adaptive, Guherbarê Dûvê

Girêka elektrîkî ya Z-EFG-130 piştgirîya kelepçekirina adapteyî dike, ew ji bo tiştên dorhêl, sferîk an jî bi şiklê taybetî guncawtir e, beşên dûvikê wê dikarin bi rehetî werin guheztin, xerîdar dikarin tiştan li gorî hewcedariya xwe kelepçe bikin.


Modên Kontrolê yên Pirjimar, Bikaranîna Hêsan

Girêka elektrîkî dikare bi rastbûna Modbus-ê were kontrol kirin, mîhengê wê hêsan e, ji bo karanîna protokola ragihandinê ya Digital I/O, tenê hewceyê yek kabloyê ye ku bi ON/OFF ve girêdayî bibe, ew bi pergala kontrola sereke ya PLC-ê re hevaheng e.
Cihêrengiya Navenda Giraniyê ya Barkirinê
Karsaziya me


Kategoriyên berheman
-

Robota Pîşesaziyê ya Bihayê Reqabetê ya 6 Axis Manip ...
-

Hilbijêrin û Cihê Hêkê ya Fêkiyan a Pîşesaziyê ya Leza Bilind 4 ...
-

Dobot Şeş Axis Collaborative Robot Arm Articulate...
-

Manîpulatora Teleskopî ya Artêşa Bi Destê Robotîk a Dirêj 20...
-
Robotê Mekanîkî yê 6-Axis Metal Armê Robotê ya Firotanê ya Germ ...
-

Manîpulatorê 4 Axis Armê Robotê Makîneya Pîşesaziyê...